1-D posterior toy example (RBF covariance)
Demonstration of posterior error bounds for a 1-D toy example, for various levels of sensor noise
In this notebook we will demonstrate the error bounds for the statFEM posterior for the toy example introduced in oneDim. We first import some required packages.
[2]:
from dolfin import *
set_log_level(LogLevel.ERROR)
import numpy as np
import numba
import pandas as pd
import matplotlib.pyplot as plt
import seaborn as sns
import matplotlib.cm as cm
plt.rcParams['figure.figsize'] = (10,6)
from scipy.stats import multivariate_normal, linregress
from scipy import integrate
from scipy.spatial.distance import cdist, pdist, squareform
from scipy.linalg import sqrtm
from scipy.interpolate import interp1d
import sympy; sympy.init_printing()
from tqdm import tqdm
# code for displaying matrices nicely
def display_matrix(m):
display(sympy.Matrix(m))
# import required functions from oneDim
from statFEM_analysis.oneDim import mean_assembler, cov_assembler, kernMat, m_post, gen_sensor, MyExpression, m_post_fem_assembler, c_post, c_post_fem_assembler
We now set up the mean and kernel functions for the random forcing term \(f\). We also set up the true prior solution mean for use with FEniCS.
[3]:
# set up mean and kernel functions
l_f = 0.4
σ_f = 0.1
@numba.jit
def m_f(x):
return 1.0
@numba.jit
def c_f(x,y):
return (σ_f**2)*np.exp(-(x-y)**2/(2*(l_f**2)))
# translation invariant form of c_f
@numba.jit
def k_f(x):
return (σ_f**2)*np.exp(-(x**2)/(2*(l_f**2)))
# mean of forcing for use in FEniCS
f_bar = Constant(1.0)
# true prior solution mean
μ_true = Expression('0.5*x[0]*(1-x[0])',degree=2)
We now set up the required funtions to compute the true prior covariance \(c_u\) using the Green’s function together with quadrature.
[4]:
# compute inner integral over t
def η(w,y):
I_1 = integrate.quad(lambda t: t*c_f(w,t),0.0,y)[0]
I_2 = integrate.quad(lambda t: (1-t)*c_f(w,t),y,1.0)[0]
return (1-y)*I_1 + y*I_2
# use this function eta and compute the outer integral over w
def c_u(x,y):
I_1 = integrate.quad(lambda w: (1-w)*η(w,y),x,1.0)[0]
I_2 = integrate.quad(lambda w: w*η(w,y),0.0,x)[0]
return x*I_1 + (1-x)*I_2
We will also need a function u_quad to accurately compute the solution for a given realisation of \(f\) in order to generate sensor data. This is set up below:
[5]:
def u_quad(x,f,maxiter=50):
I_1 = integrate.quadrature(lambda w: w*f(w), 0.0, x,maxiter=maxiter)[0]
I_2 = integrate.quadrature(lambda w: (1-w)*f(w),x, 1.0,maxiter=maxiter)[0]
return (1-x)*I_1 + x*I_2
We now set up a reference grid on which we will compare the true and statFEM covariance functions. We take a grid of length \(N = 41\).
[6]:
N = 41
grid = np.linspace(0,1,N)
We now set up the sensor grid and the true prior covariance on this sensor grid which will be needed in all further computations. We also set up the function which gives the vector \(\{c_u(x,y_i)\}_{i=1}^{s}\) needed for the posterior.
[7]:
s = 10 # number of sensors
# create sensor grid
Y = np.linspace(0.01,0.99,s)[::-1]
# get true prior covariance on sensor grid
C_true_s = kernMat(c_u,Y.flatten())
# create function to compute vector mentioned above
def c_u_vect(x):
return np.array([c_u(x,y_i) for y_i in Y])
We now set up a function to get the statFEM prior and posterior for a FE mesh of size \(h\), using functions from oneDim.
[8]:
# set up function to compute fem_prior
def fem_prior(h,f_bar,k_f,grid):
J = int(np.round(1/h))
μ = mean_assembler(h,f_bar)
Σ = cov_assembler(J,k_f,grid,False,True)
return μ,Σ
[9]:
# set up function to compute statFEM posterior
def fem_posterior(h,f_bar,k_f,ϵ,Y,v_dat,grid):
J = int(np.round(1/h))
m_post_fem = m_post_fem_assembler(J,f_bar,k_f,ϵ,Y,v_dat)
μ = MyExpression()
μ.f = m_post_fem
Σ = c_post_fem_assembler(J,k_f,grid,Y,ϵ,False,True)
return μ,Σ
We now set up a function to compare the covariance functions on the reference grid. This function computes an approximation of the covariance contribution to the 2-Wasserstein distance discussed in oneDim.
[10]:
# function to compute cov error
def compute_cov_diff(C_fem,C_true,C_true_sqrt,tol=1e-10):
N = C_true.shape[0]
C12 = C_true_sqrt @ C_fem @ C_true_sqrt
C12_sqrt = np.real(sqrtm(C12))
rel_error = np.linalg.norm(C12_sqrt @ C12_sqrt - C12)/np.linalg.norm(C12)
assert rel_error < tol
h = 1/(N-1)
return h*(np.trace(C_true) + np.trace(C_fem) - 2*np.trace(C12_sqrt))
With all of this in place we can now set up a function which computes an approximation of the 2-Wasserstein distance between the true and statFEM posteriors.
[11]:
def W(μ_fem_s,μ_true_s,Σ_fem_s,Σ_true_s,Σ_true_s_sqrt,J_norm):
mean_error = errornorm(μ_true_s,μ_fem_s,'L2',mesh=UnitIntervalMesh(J_norm))
cov_error = compute_cov_diff(Σ_fem_s,Σ_true_s,Σ_true_s_sqrt)
cov_error = np.sqrt(np.abs(cov_error))
error = mean_error + cov_error
return error
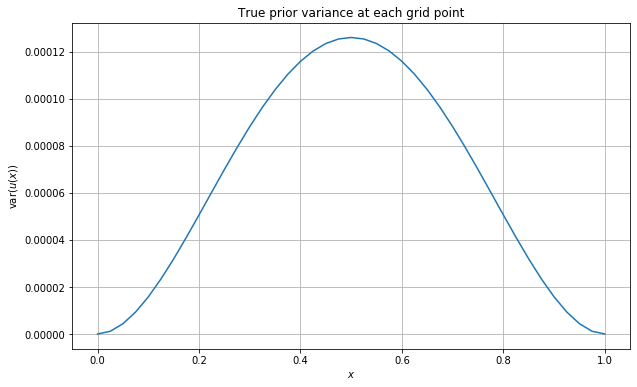
We now set up a range of \(h\) values on which to compute this error together with a range of noise levels to use. We determine the noise levels by investigating the variances of the true prior solution at each point of the grid. We do this by plotting c_u(x,x) for x in grid. We also print some summary statistics of these variances. We also set up the J_norm variable needed to control the grid on which the mean error is computed in the Wasserstein distance.
[12]:
#hide_input
grid_vars = np.array([c_u(x,x) for x in grid])
plt.plot(grid,grid_vars)
plt.grid()
plt.xlabel('$x$')
plt.ylabel('$\operatorname{var}(u(x))$')
plt.title('True prior variance at each grid point')
plt.show()
pd.DataFrame({'Prior Variance' : grid_vars}).describe()
[12]:
| Prior Variance | |
|---|---|
| count | 41.000000 |
| mean | 0.000065 |
| std | 0.000045 |
| min | 0.000000 |
| 25% | 0.000023 |
| 50% | 0.000070 |
| 75% | 0.000110 |
| max | 0.000126 |
[13]:
#hide_input
h_range_tmp = np.linspace(0.25,0.025,100)
h_range = 1/np.unique(np.round(1/h_range_tmp))
# print h_range to 2 decimal places
print('h values: ' + str(np.round(h_range,3))+'\n')
# noise levels to use
ϵ_list = [0.0001/2,0.0001,0.01,0.1]
print('ϵ values: ' + str(ϵ_list))
J_norm = 40
h values: [0.25 0.2 0.167 0.143 0.125 0.111 0.1 0.091 0.083 0.077 0.071 0.067
0.062 0.059 0.056 0.053 0.05 0.048 0.045 0.043 0.042 0.038 0.037 0.034
0.032 0.029 0.027 0.025]
ϵ values: [5e-05, 0.0001, 0.01, 0.1]
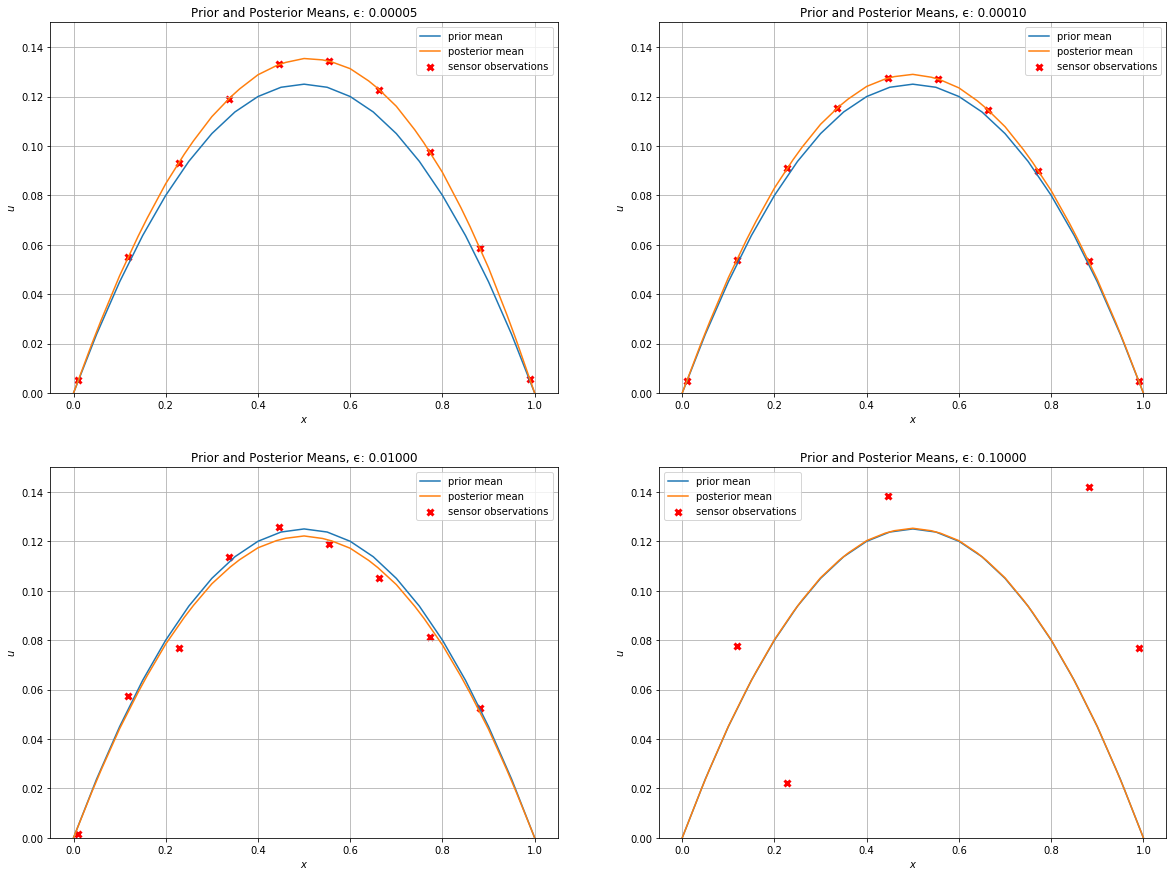
Let’s see how the different levels of sensor noise change the statFEM posterior from the statFEM prior.
[14]:
h = 0.05
μ_prior, Σ_prior = fem_prior(h,f_bar,k_f,grid)
posteriors = {}
sensor_dat = {}
np.random.seed(12345)
for ϵ in ϵ_list:
v_dat = gen_sensor(ϵ,m_f,k_f,Y,u_quad,grid,maxiter=200)
sensor_dat[ϵ] = v_dat
μ_posterior, Σ_posterior = fem_posterior(h,f_bar,k_f,ϵ,Y,v_dat,grid)
posteriors[ϵ] = (μ_posterior,Σ_posterior)
We now plot the prior mean together with the different posterior means and sensor data.
[15]:
#hide_input
plt.figure(figsize=(20,15))
J_plot = 50
for (i,ϵ) in enumerate(ϵ_list):
μ_posterior, Σ_posterior = posteriors[ϵ]
v_dat = sensor_dat[ϵ]
plt.subplot(2,2,i + 1)
plot(μ_prior,mesh=UnitIntervalMesh(J_plot),label='prior mean')
plot(μ_posterior,mesh=UnitIntervalMesh(J_plot),label='posterior mean')
plt.scatter(Y,v_dat,c='red',linewidth=3,marker='x',label='sensor observations')
plt.grid()
plt.xlabel("$x$")
plt.ylabel("$u$")
plt.ylim(0,0.15)
plt.title('Prior and Posterior Means, ϵ: %.5f' % ϵ)
plt.legend()
plt.show()
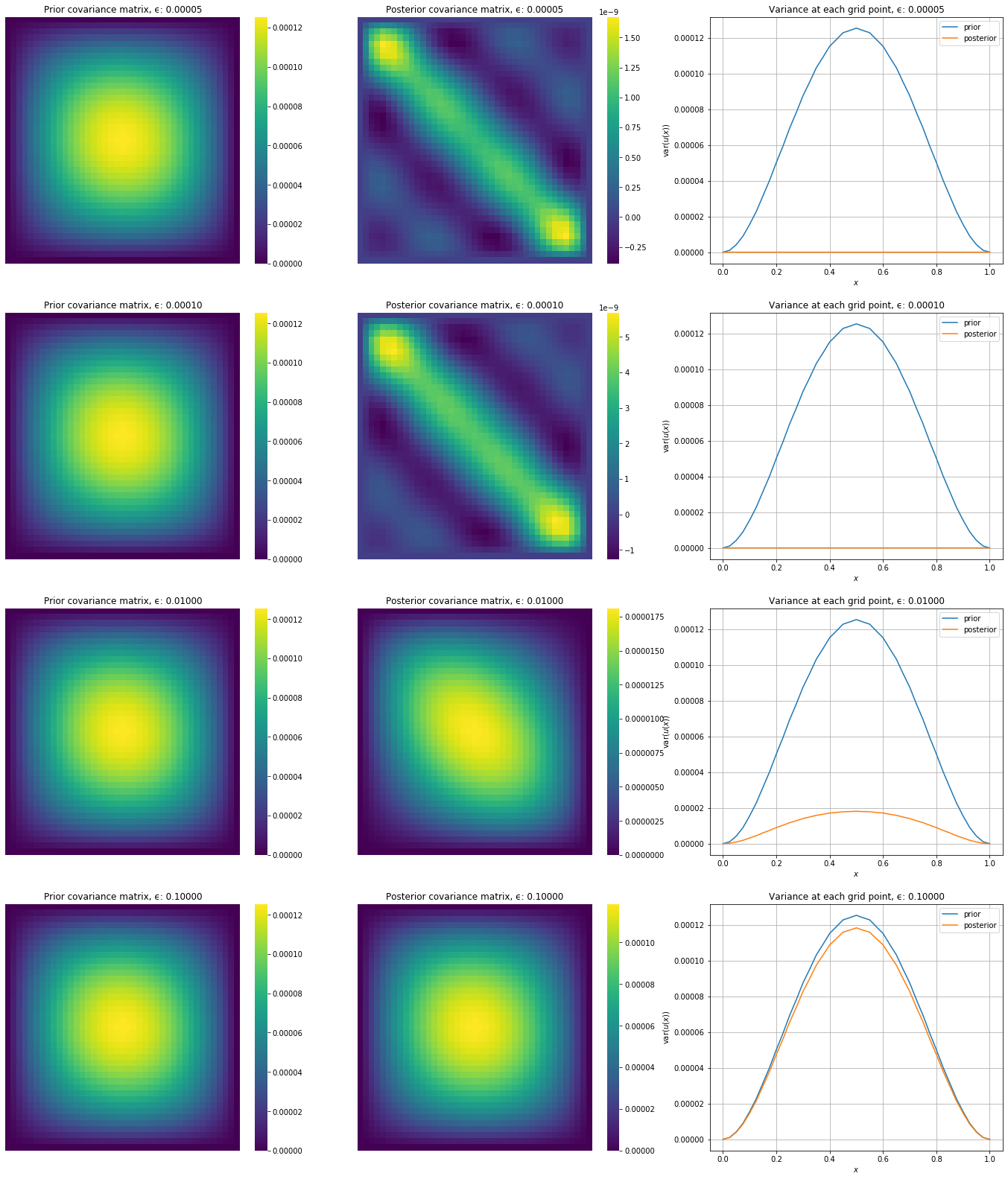
Let’s also plot the prior covariances next to the posterior covariances
[16]:
#hide_input
fig, axs = plt.subplots(4,3,figsize=(24,28))
for (i,ϵ) in enumerate(ϵ_list):
μ_posterior, Σ_posterior = posteriors[ϵ]
sns.heatmap(Σ_prior,cbar=True,
annot=False,
xticklabels=False,
yticklabels=False,
cmap=cm.viridis,
ax=axs[i,0])
axs[i,0].set_title('Prior covariance matrix, ϵ: %.5f' % ϵ)\
sns.heatmap(Σ_posterior,cbar=True,
annot=False,
xticklabels=False,
yticklabels=False,
cmap=cm.viridis,
ax=axs[i,1])
axs[i,1].set_title('Posterior covariance matrix, ϵ: %.5f' % ϵ)
axs[i,2].plot(grid,np.diag(Σ_prior),label='prior')
axs[i,2].plot(grid,np.diag(Σ_posterior),label='posterior')
axs[i,2].grid()
axs[i,2].set_xlabel('$x$')
axs[i,2].set_ylabel('$\operatorname{var}(u(x))$')
axs[i,2].set_title('Variance at each grid point, ϵ: %.5f' % ϵ)
axs[i,2].legend()
plt.show()
We will now loop over the list of noise levels, generate sensor data, get the statFEM posterior and true posterior and compute the error.
[17]:
#hide
set_log_level(LogLevel.ERROR)
[18]:
%%time
results = {}
np.random.seed(42)
tol = 1e-10 # tolerance for computation of posterior cov sqrt
for i, ϵ in enumerate(ϵ_list):
# generate sensor data
v_dat = gen_sensor(ϵ,m_f,k_f,Y,u_quad,grid,maxiter=200)
# get true B mat required for posterior
B_true = (ϵ**2)*np.eye(s) + C_true_s
# set up true posterior mean
def true_mean(x):
return m_post(x,μ_true,c_u_vect,v_dat,Y,B_true)
μ_true_s = MyExpression()
μ_true_s.f = true_mean
# set up true posterior covariance
def c_post_true(x,y):
return c_post(x,y,c_u,Y,B_true)
Σ_true_s = kernMat(c_post_true,grid.flatten())
Σ_true_s_sqrt = np.real(sqrtm(Σ_true_s))
rel_error = np.linalg.norm(Σ_true_s_sqrt @ Σ_true_s_sqrt - Σ_true_s) / np.linalg.norm(Σ_true_s)
if rel_error >= tol:
print('ERROR')
break
# loop over the h values and compute the errors
# first create a list to hold these errors
res = []
for h in tqdm(h_range,desc=f'#{i+1} epsilon, h loop', position=0, leave=True):
# get statFEM posterior mean and cov mat
μ_fem_s, Σ_fem_s = fem_posterior(h,f_bar,k_f,ϵ,Y,v_dat,grid)
# compute the error
error = W(μ_fem_s,μ_true_s,Σ_fem_s,Σ_true_s,Σ_true_s_sqrt,J_norm)
# store this in res
res.append(error)
# store ϵ value with errors in the dictionary
results[ϵ] = res
#1 epsilon, h loop: 0%| | 0/28 [00:00<?, ?it/s]
Calling FFC just-in-time (JIT) compiler, this may take some time.
Calling FFC just-in-time (JIT) compiler, this may take some time.
Calling FFC just-in-time (JIT) compiler, this may take some time.
#1 epsilon, h loop: 100%|██████████| 28/28 [01:25<00:00, 3.04s/it]
#2 epsilon, h loop: 100%|██████████| 28/28 [01:22<00:00, 2.93s/it]
#3 epsilon, h loop: 100%|██████████| 28/28 [01:23<00:00, 2.98s/it]
#4 epsilon, h loop: 100%|██████████| 28/28 [01:29<00:00, 3.18s/it]
CPU times: user 5min 38s, sys: 223 ms, total: 5min 38s
Wall time: 6min 8s
We now analyse the results by plotting the errors on a log-log scale for each noise level on the same figure. We expect a line of best fit with a slope of \(p=2\). The results are shown below:
[19]:
#hide
log_h_range = np.log(h_range)
x = np.linspace(np.min(log_h_range),np.max(log_h_range),100)
[20]:
#hide_input
plt.plot()
plt.grid()
plt.xlabel('$\log(h)$')
plt.ylabel('$\log(W)$')
for ϵ in ϵ_list:
errors = results[ϵ]
log_errors = np.log(errors)
lm = linregress(log_h_range,log_errors)
print('ϵ: %.5f, slope: %.4f, intercept: %.4f' % (ϵ, lm.slope,lm.intercept))
plt.scatter(log_h_range,log_errors)
plt.plot(x,lm.intercept + lm.slope * x, label='ϵ = ' +str(ϵ))
plt.plot(x,-1.5+2*x,'--',c='black',label='reference line')
plt.legend()
plt.title('Plot of $\log(W)$ vs $\log(h)$ for different sensor noise levels')
plt.show()
ϵ: 0.00005, slope: 2.0162, intercept: -2.9227
ϵ: 0.00010, slope: 2.0102, intercept: -2.9486
ϵ: 0.01000, slope: 1.9912, intercept: -2.7740
ϵ: 0.10000, slope: 1.9941, intercept: -2.2308
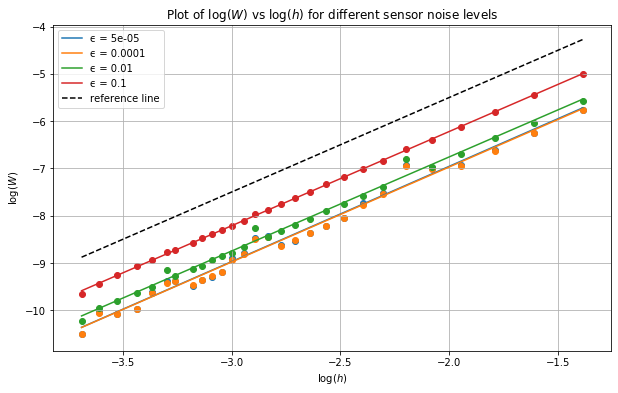
From the above plot we can see that we indeed obtain slopes of arouund 2 and further that the lines for different noise levels are parallel, reflecting the different proportionality constants as different intercepts.