Building up tools to analyse a 2-D problem
Code for a 2-D problem.
[1]:
from dolfin import *
import numpy as np
import matplotlib.pyplot as plt
import seaborn as sns
import matplotlib.cm as cm
import matplotlib.colors as colors
import matplotlib.colorbar as colorbar
import matplotlib.tri as tri
plt.rcParams['figure.figsize'] = (10,6)
import sympy; sympy.init_printing()
# code for displaying matrices nicely
def display_matrix(m):
display(sympy.Matrix(m))
2 dimensional case (PDE)
We consider the following 2-D problem:
where here \(f\) is again a random forcing term, assumed to be a GP in this work.
Variational formulation
The variational formulation is given by:
where:
and
We will make the following choices for \(\kappa,f\):
where \(\|\cdot\|\) is the usual Euclidean norm.
Since we do not have access to a suitable Green’s function for this problem, we will have to estimate the rate of convergence of the statFEM prior and posterior by comparing them on a sequence of refined meshes. More details on this will follow later. Thus, we need similar code as for the 1-D problem.
statFEM prior mean
We will again utilise FEniCS to obtain the statFEM prior mean. For this purpose, we create a function mean_assembler() which will assemble the mean for the statFEM prior.
[2]:
from statFEM_analysis.twoDim import mean_assembler
mean_assembler takes in the mesh size h and the mean function f_bar for the forcing and computes the mean of the approximate statFEM prior, returning this as a FEniCS function.
Important:
mean_assembler requires f_bar to be represented as a FEniCS function/expression/constant.
Let’s check that this is working:
[3]:
h = 0.1
f_bar = Constant(1.0)
μ = mean_assembler(h,f_bar)
μ
[3]:
Coefficient(FunctionSpace(Mesh(VectorElement(FiniteElement('Lagrange', triangle, 1), dim=2), 1), FiniteElement('Lagrange', triangle, 1)), 9)
[4]:
# check the type of μ
assert type(μ) == function.function.Function
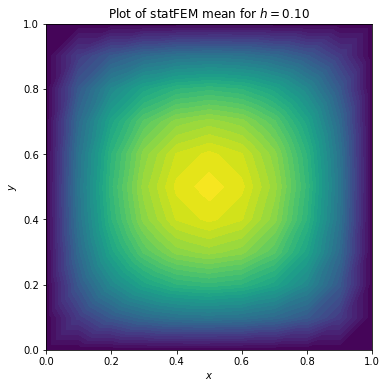
Let’s plot \(\mu\):
[5]:
# use FEniCS to plot μ
plot(μ)
plt.xlabel(r'$x$')
plt.ylabel(r'$y$')
plt.title(r'Plot of statFEM mean for $h=%.2f$'%h)
plt.show()
statFEM prior covariance
We will also utilise FEniCS again to obtain an approximation of our statFEM covariance function.
The statFEM covariance can be approximated as follows:
where \(Q=A^{-1}MC_{f}M^{T}A^{-T}\) and where the \(\{\varphi_{i}\}_{i=1}^{J}\) are the FE basis functions corresponding to the interior nodes of our domain.
with \(C_f\) being the kernel matrix of \(f\) (evaluated on the FEM grid).
As we will be comparing the statFEM covariance functions for finer and finer FE mesh sizes we will need to be able to assemble the statFEM covariance function on a grid. As discussed in oneDim, we can assemble such covariance matrices in a very efficient manner. The code remains largely the same as in the 1-D case and so we do not go into as much detail here.
We start by creating a function kernMat() which assembles the covariance matrix corresponding to a covariance function k on a grid grid.
[6]:
from statFEM_analysis.twoDim import kernMat
Note:
This function takes in two optional boolean arguments parallel and translation_inv. The first of these specifies whether or not the cov matrix should be computed in parallel and the second specifies whether or not the cov kernel is translation invariant. If it is, the covariance matrix is computed more efficiently using the cdist function from scipy.
Let’s quickly test if this function is working, by computing the cov matrix for white noise, which has kernel function \(k(x,y)=\delta(x-y)\). For a grid of length \(N\) this should be the \(N\times N\) identity matrix.
[7]:
# set up the kernel function
# set up tolerance for comparison
tol = 1e-16
def k(x,y):
if (np.abs(x-y) < tol).all():
# x == y within the tolerance
return 1.0
else:
# x != y within the tolerance
return 0.0
# set up grid
n = 21
x_range = np.linspace(0,1,n)
grid = np.array([[x,y] for x in x_range for y in x_range])
N = len(grid) # get length of grid (N=n^2)
K = kernMat(k,grid,True,False) # parallel mode
# check that this is the N x N identity matrix
assert (K == np.eye(N)).all()
We now create a function BigPhiMat() to utilise FEniCS to efficiently compute the matrix \(\boldsymbol{\Phi}\) defined above.
[8]:
from statFEM_analysis.twoDim import BigPhiMat
BigPhiMat takes in two arguments: J, which controls the FE mesh size (\(h=1/J^{2}\)), and grid which is the grid in the definition of \(\boldsymbol{\Phi}\). BigPhiMat returns \(\boldsymbol{\Phi}\) as a sparse csr_matrix for memory efficiency.
Note:
Since FEniCS works with the FE functions corresponding to all the FE dofs and our matrix \(\Sigma_2\) only uses the FE functions corresponding to non-boundary dofs we need to account for this in the code. See the source code for BigPhiMat to see how this is done.
We now create a function cov_asssembler() which assembles the approximate FEM covariance matrix on the grid.
[9]:
from statFEM_analysis.twoDim import cov_assembler
cov_assembler takes in several arguments which are explained below:
J: controls the FE mesh size (\(h=1/J^{2})\)k_f: the covariance function for the forcing \(f\)grid: the reference grid where the FEM cov matrix should be computed onparallel: boolean argument indicating whether the intermediate computation of \(C_f\) should be done in paralleltranslation_inv: boolean argument indicating whether the intermediate computation of \(C_f\) should be computed assumingk_fis translation invariant or not
As a quick demonstration that the code is working, we will the statFEM cov matrix for a relatively coarse grid.
[10]:
# set up kernel function for forcing
f_bar = Constant(1.0)
l_f = 0.4
σ_f = 0.1
def k_f(x):
return (σ_f**2)*np.exp(-(x**2)/(2*(l_f**2)))
# set up grid
n = 21
x_range = np.linspace(0,1,n)
grid = np.array([[x,y] for x in x_range for y in x_range])
# get the statFEM grid for a particular choice of J
J = 10
Σ = cov_assembler(J,k_f,grid,False,True)
Let’s plot a heatmap of the statFEM cov matrix:
[11]:
sns.heatmap(Σ,cbar=True,
annot=False,
xticklabels=False,
yticklabels=False,
cmap=cm.viridis)
plt.title('Heat map of statFEM covariance matrix')
plt.show()
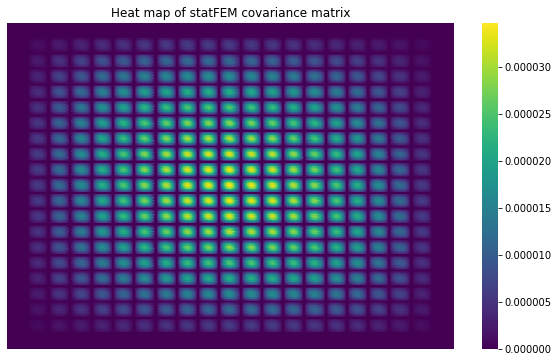
Note:
The banded structure in the above statFEM covariance matrix is due to the internal ordering of the FE grid in FEniCS.
statFEM posterior mean
The statFEM posterior from incorporating sensor readings has the same form as given in oneDim. We will thus require very similar code as to the 1-D case. We start by creating a function m_post() which evaluates the posterior mean at a given point.
[12]:
from statFEM_analysis.twoDim import m_post
m_post takes in several arguments which are explained below:
x: point where the posterior mean will be evaluatedm: function which computes the prior mean at a given point yc: function which returns the vector (c(x,y)) for y in Y (note: c is the prior covariance function)v: vector of noisy sensor readingsY: vector of sensor locationsB: the matrix \(\epsilon^{2}I+C_Y\) to be inverted in order to obtain the posterior
We now require code to generate samples from a GP with mean \(m\) and cov function \(k\) on a grid. We write the function sample_gp() for this purpose.
[13]:
from statFEM_analysis.twoDim import sample_gp
sample_gp takes in several arguments which are explained below:
n_sim: number of trajectories to be sampledm: mean function for the GPk: cov function for the GPgrid: grid of points on which to sample the GPpar: boolean argument indicating whether the computation of the cov matrix should be done in paralleltrans: boolean argument indicating whether the computation of the cov matrix should be computed assumingkis translation invariant or nottol: controls the size of the tiny diagonal perturbation added to cov matrix to ensure it is strictly positive definite (defaults to1e-9)
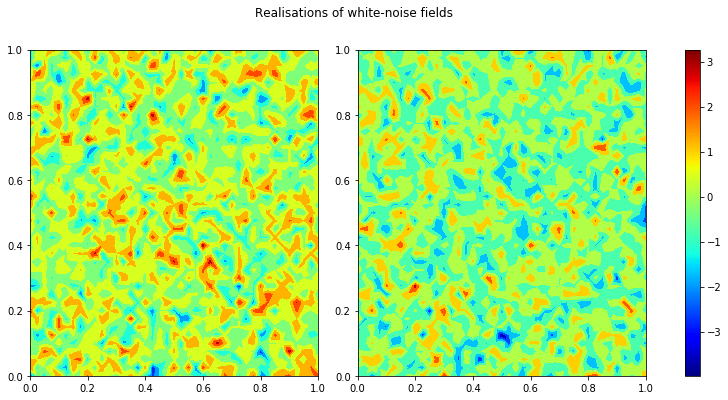
As a quick demonstration that the code is working lets generate 2 realisations of white noise, using the kernel k from one of the previous tests and plot a heatmap of these random fields side-by-side.
[14]:
n = 41
x_range = np.linspace(0,1,n)
grid = np.array([[x,y] for x in x_range for y in x_range])
# set up mean
def m(x):
return 0.0
np.random.seed(23534)
samples = sample_gp(2,m,k,grid,True,False)
sample_1 = samples[:,0].flatten()
sample_2 = samples[:,1].flatten()
vmin = min(sample_1.min(),sample_2.min())
vmax = max(sample_1.max(),sample_2.max())
cmap = cm.jet
norm = colors.Normalize(vmin=vmin,vmax=vmax)
x = grid[:,0].flatten()
y = grid[:,1].flatten()
triang = tri.Triangulation(x,y)
plt.rcParams['figure.figsize'] = (12,6)
fig, axs = plt.subplots(ncols=3, gridspec_kw=dict(width_ratios=[4,4,0.2]))
axs[0].tricontourf(triang,sample_1.flatten(),cmap=cmap)
axs[1].tricontourf(triang,sample_2.flatten(),cmap=cmap)
cb = colorbar.ColorbarBase(axs[2],cmap=cmap,norm=norm)
fig.suptitle('Realisations of white-noise fields')
plt.show()
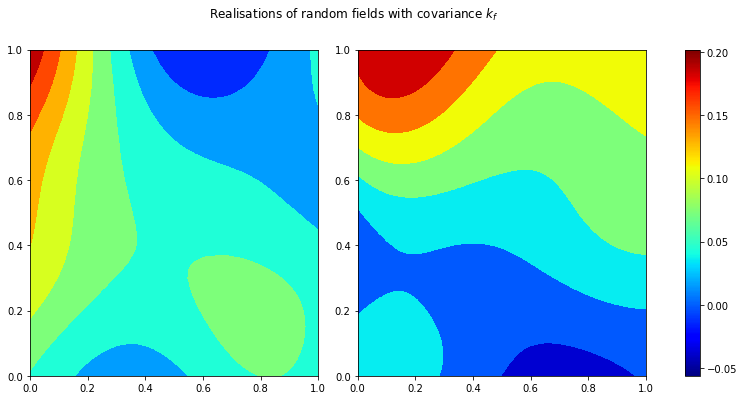
Let’s also quickly generate 2 realisations for the kernel k_f above:
[15]:
np.random.seed(534)
samples = sample_gp(2,m,k_f,grid,False,True)
sample_1 = samples[:,0].flatten()
sample_2 = samples[:,1].flatten()
vmin = min(sample_1.min(),sample_2.min())
vmax = max(sample_1.max(),sample_2.max())
cmap = cm.jet
norm = colors.Normalize(vmin=vmin,vmax=vmax)
x = grid[:,0].flatten()
y = grid[:,1].flatten()
triang = tri.Triangulation(x,y)
plt.rcParams['figure.figsize'] = (12,6)
fig, axs = plt.subplots(ncols=3, gridspec_kw=dict(width_ratios=[4,4,0.2]))
axs[0].tricontourf(triang,sample_1.flatten(),cmap=cmap)
axs[1].tricontourf(triang,sample_2.flatten(),cmap=cmap)
cb = colorbar.ColorbarBase(axs[2],cmap=cmap,norm=norm)
fig.suptitle(r'Realisations of random fields with covariance $k_f$')
plt.show()
The next bit of code we require is code to generate noisy sensor readings from our system. We write the function gen_sensor() for this purpose.
[16]:
from statFEM_analysis.twoDim import gen_sensor
gen_sensor takes in several arguments which are explained below:
ϵ: controls the amount of sensor noisem: mean function for the forcing fk: cov function for the forcing fY: vector of sensor locationsJ: controls the FE mesh size (\(h=1/J^{2}\))par: boolean argument indicating whether the computation of the forcing cov matrix should be done in paralleltrans: boolean argument indicating whether the computation of the forcing cov matrix should be computed assumingkis translation invariant or nottol: controls the size of the tiny diagonal perturbation added to forcing cov matrix to ensure it is strictly positive definite (defaults to1e-9)require: boolean argument indicating whether or not to also return the realisation of the forcingf_simand the FEniCS solutionu_sol(defaults toFalse)
Warning:
Since we do not have access to the true solution we must use FEniCS to get the solution for our system. Thus, one must choose a small enough J in gen_sensor above to ensure we get realistic noisy sensor readings.
Let’s demonstrate that this code is working, by generating \(s=25\) sensor observations with the sensors equally space in the domain \(D\).
[17]:
# set up mean function for forcing
def m_f(x):
return 1.0
# set up sensor grid and sensor noise level
ϵ = 0.2
s = 25
s_sqrt = int(np.round(np.sqrt(s)))
Y_range = np.linspace(0.01,0.99,s_sqrt)
Y = np.array([[x,y] for x in Y_range for y in Y_range])
J_fine = 100 # FE mesh size to compute solution on
# generate the sensor observations
np.random.seed(235)
v_dat = gen_sensor(ϵ,m_f,k_f,Y,J_fine,False,True)
The next bit of code needed in order to compute the difference between the posterior means is a way of comparing the two different mean functions. One possible solution is to overload the UserExpression class in FEniCS to create custom FEniCS expressions from user defined functions. This will allow us to use our function m_post together with errornorm from FEniCS to compute the L2 norm of the difference. We thus, create a class called
MyExpression().
[18]:
from statFEM_analysis.twoDim import MyExpression
We now require code which will create the matrix \(C_Y,h\) and the function \(\mathbf{c}^{(h)}\) required for the statFEM posterior mean. We will create the function fem_cov_assembler_post() for this purpose.
[19]:
from statFEM_analysis.twoDim import fem_cov_assembler_post
fem_cov_assembler_post takes in several arguments which are explained below:
J: controls the FE mesh size (\(h=1/J^2\))k_f: the covariance function for the forcing \(f\)Y: vector of sensor locationsparallel: boolean argument indicating whether the computation of the forcing cov mat should be done in paralleltranslation_inv: boolean argument indicating whether the computation of the forcing cov mat should be computed assumingk_fis translation invariant or not
With all of this code in place we can now finally write the function m_post_fem_assmebler() which will assemble the statFEM posterior mean function.
[20]:
from statFEM_analysis.twoDim import m_post_fem_assembler
m_post_fem_assembler takes in several arguments which are explained below:
J: controls the FE mesh size (\(h=1/J^{2}\))f_bar: the mean function for the forcing \(f\)k_f: the covariance function for the forcing \(f\)ϵ: controls the amount of sensor noiseY: vector of sensor locationsv_dat: vector of noisy sensor observationspar: boolean argument passed tofem_cov_assembler_post’s argumentparallel(defaults toFalse)trans: boolean argument passed tofem_cov_assembler_post’s argumenttranslation_inv(defaults toTrue)
Let’s quickly check that this function is working.
[21]:
J = 20
f_bar = Constant(1.0)
m_post_fem = m_post_fem_assembler(J,f_bar,k_f,ϵ,Y,v_dat)
# compute posterior mean at a location x in D
x = np.array([0.3,0.1])
m_post_fem(x)
[21]:
statFEM posterior covariance
The form of the statFEM posterior covariance remains the same as given in oneDim. Thus, we require very similar code as to the 1-D case. We start by creating a function c_post() which evaluates the posterior covariance at a given point.
[22]:
from statFEM_analysis.twoDim import c_post
c_post takes in several arguments which are explained below:
x,y: points to evaluate the covariance atc: function which returns the prior covariance at any given pair \((x,y)\)Y: vector of sensor locationsB: the matrix \(\epsilon^{2}I+C_{Y}\) to be inverted in order to obtain the posterior
To compare the statFEM covariance matrices for finer and finer FE mesh sizes we will require some more code. First we create a function post_fem_cov_assembler() which helps us to quickly assemble the statFEM posterior covariance matrix as explained in oneDim.
[23]:
from statFEM_analysis.twoDim import post_fem_cov_assembler
post_fem_cov_assembler takes in several arguments which are explained below:
J: controls the FE mesh size (\(h=1/J^2\))k_f: the covariance function for the forcing \(f\)grid: the fixed reference grid \(\{x_{i}\}_{i=1}^{N}\) on which to assemble the posterior cov matY: vector of sensor locations.parallel: boolean argument indicating whether the computation of the forcing cov mat should be done in paralleltranslation_inv: boolean argument indicating whether the computation of the forcing cov mat should be computed assumingk_fis translation invariant or not
Finally, we create the function c_post_fem_assembler() which assembles the statFEM posterior cov mat on the reference grid using the matrices post_fem_cov_assembler returns.
[24]:
from statFEM_analysis.twoDim import c_post_fem_assembler